








| Inicio » Archivos » Cuerpo Humano » Anatomía del Cuerpo Humano |
Ejes y Planos Anatómicos
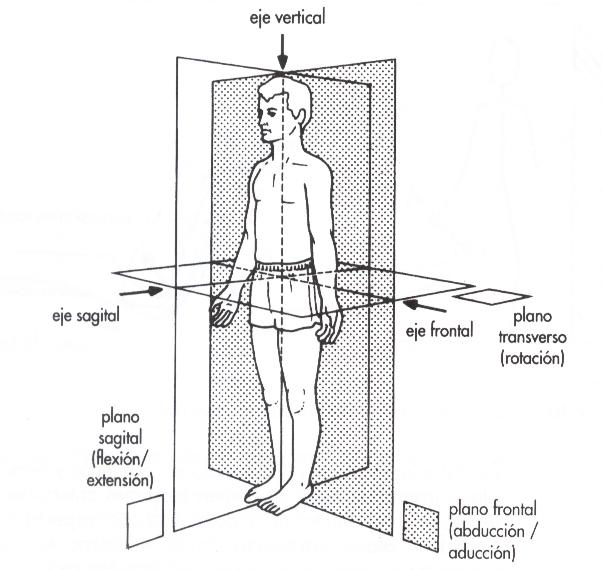
EJES Y PLANOS DE MOVIMIENTO DEL CUERPOA través de los ejes y planos de movimiento podemos estudiar y clasificar mejor los movimientos que pueden realizar cada una de las diferentes articulaciones que el cuerpo humano posee. La relación existente entre ejes y planos se basa en que cuando un movimiento se produce en un determinado plano, la articulación se mueve o gira sobre un eje que se encuentra a 90° respecto de dicho plano. Se distinguen tres planos y tres ejes de movimiento:
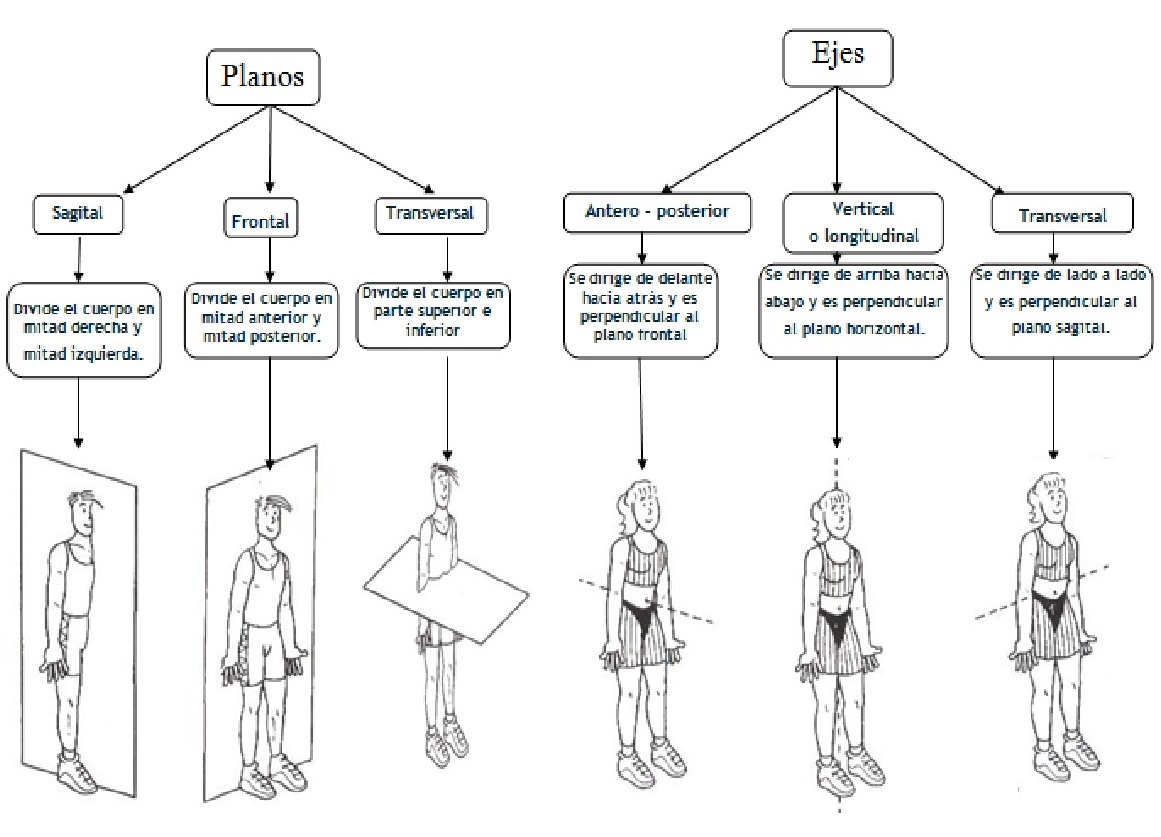
PLANOS:
EJES:
RELACIÓN PLANOS Y EJES:
Cada uno de los tres planos del cuerpo tiene un eje asociado que pasa perpendicularmente a través del cuerpo. El movimiento se produce en un plano y alrededor de un eje. La abducción y la aducción se llevan a cabo en el plano frontal alrededor del eje antero-posterior; la flexión y la extensión se producen en un plano sagital alrededor de un eje transverso; y la rotación se desarrolla en un plano transversal alrededor de un eje vertical. En realidad, los movimientos no se producen únicamente en un plano, sino en varios. Ello es debido a que una serie compleja de movimientos se combinan para hacer posible un movimiento que se desarrolla en tres píanos alrededor de un eje oblicuo.
Si te interesa la formación en Actividad Física y Deporte seguramente te interese: la FP de TSEAS o TSAF, las Enseñanzas Deportivas o, el Grado en Ciencias de la Actividad Física y del Deporte (INEF). | |
| Categoría: Cuerpo Humano, Anatomía del Cuerpo Humano |
|
|
| ¡No dudes en dejar un comentario! | |
|
| |
 0
0



